
Structured light point cloud from the downloadable dataset (set6).
Data Set Description
This data set (freely available) is aimed at multiple view stereo (MVS) evaluation, and is made using our robotic lab set up outlined here.
An industrial robot arm was mounted with a structured light scanner. This allowed for structured light scans corresponding to each image in the data set. The images were taken by one of the cameras in the structured light scanner. A small video presenting the dataset can be found here.
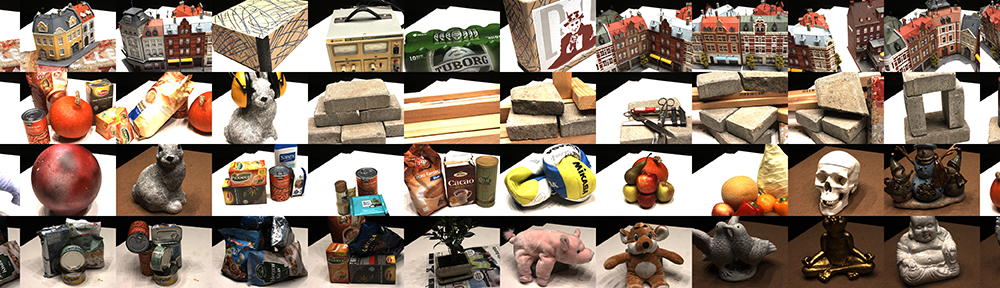
The data set consist of 124 different scenes, where 80 of them have been used in the evaluation of the above mentioned paper. The remaining 44 consist mainly of scenes that have been rotatated and scanned four times with 90 degree intervals, which enables 360 degree models. A few have been removed from the evaluation due to low quality.
The scenes include a wide range of objects in an effort to span the MVS problem. At the same time, the data set also include scenes with very similar objects, e.g. model houses, such that intra class variability can be explored. Each scene has been taken from 49 or 64 position, corresponding to the number of RGB images in each scene or scan. The image resolution is 1600 x 1200. The camera positions and internal camera parameters have been found with high accuracy, via the matlab calibration toolbox, which is also the toolbox you need to retrieve these parameters. Lastly, the scenes have been recorded in all 49 or 64 scens with seven different lighting conditions from directional to diffuse.
If you use this data set please cite the article:
Rasmus Jensen, Anders Dahl, George Vogiatzis, Engin Tola, Henrik Aanaes, “Large Scale Multi-view Stereopsis Evaluation“, CVPR, 2014, pdf bibtex
Or the extended journal version:
Henrik Aanæs, Rasmus Jensen, George Vogiatzis, Engin Tola, Anders Dahl, “Large-Scale Data for Multiple-View Stereopsis“, International Journal of Computer Vision, 2016, pdf bibtex
For more details on the data set, the reader is referred to the above mentioned papers and the downloads below.
The SampleSet below contains code and data sample sets with details specified in the included ReadMe. We have tried to break up the downloads in reasonable chunks, but some are still very large. If you encounter problems downloading it, please contact us.
Download Data and Evaluation Code
- SampleSet (6.3 GB) is the starting point. It includes ReadMe, calibration data, camera projection matrices, observability masks, evaluation code as well as set1 and set6 including all available data.
- Points (6.3 GB) is the STL reference point clouds for all the scenes.
- Points_MVS (45 GB) contains all the points clouds produced by the reference MVS methods.
- Surfaces (28 GB) contains the Poisson surface reconstruction of the MVS point clouds.
- Cleaned (136 GB) contains all the images taken under varying light settings, which have been cleaned for sensor noise.
- Rectified (123 GB) same as above but rectified removing radial distortion.