You can find the 3DV dataset here

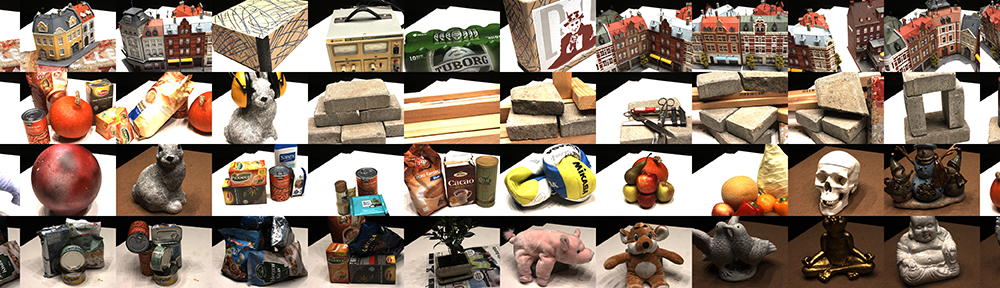
Example of a scene from the 3dv dataset
Data Set Description
This data set (freely available) is aimed at evaluation of 3D pose estimation algorithms, and is made using our robotic lab set up outlined here.
With this new 3D dataset we targeting evaluation of local and global shape descriptors and 3d object recognition algorithms. The dataset consists of point clouds and triangulated meshes from 292 physical scenes taken from 11 different views; a total of approximately 3204 views. Each of the physical scenes contain 10 occluded objects resulting in a dataset with 32040 unique object poses and 45 different object models. The 45 object models are full 360 degree models which are scanned with a high precision structured light scanner and a turntable. All the included objects belong to different geometric groups; concave, convex, cylindrical and flat 3D object models. The object models have varying amount of local geometric features to challenge existing local shape feature descriptors in terms of descriptiveness and robustness.
Scanning of Object models
If you use this data set please cite the article:
Thomas Sølund, Anders G. Buch, Norbert Krüger, and Henrik Aanæs, “A large scale
3d object recognition dataset“. In 2016 4th International Conference on
3D Vision (3DV), Standford, California, paper, bibtex